Principal AI Engineering Lead, Autonomous Systems, Microsoft AI + Research
Post on some of the insights I uncovered from my patents and inventions. How you can find the real impact of your IP and work too.
Collection of Large Multimodal Models (LMMs) and Datasets
Newly announced suite of AI tools and services for every developer on a single platform with AI Copilots.
Creating a vector embeddings database using Prisma and PostgreSQL
Frameworks for building full-stack, AI-powered, cross-platform desktop and web apps
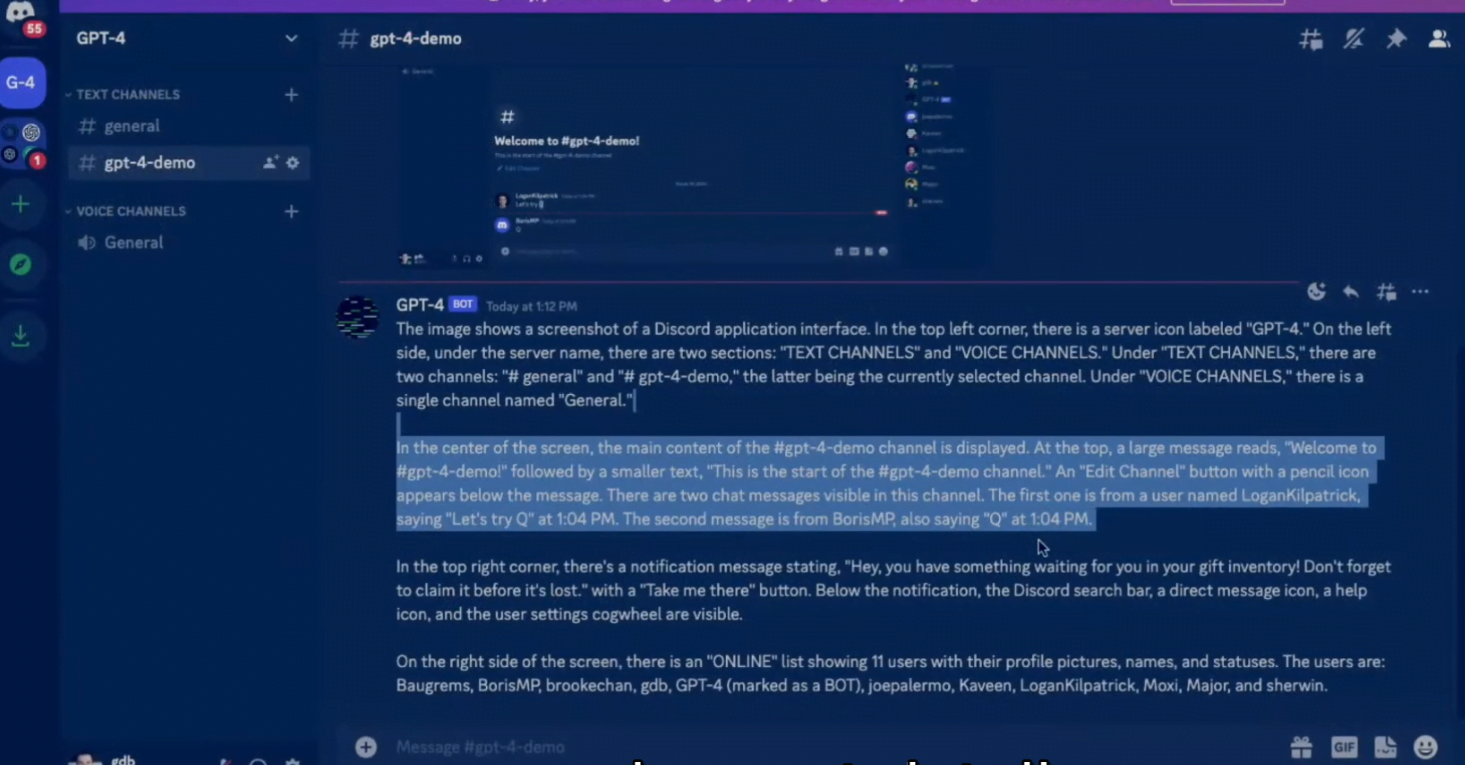
Summary of OpenAI GPT-4 Release Dev Livestream Summary
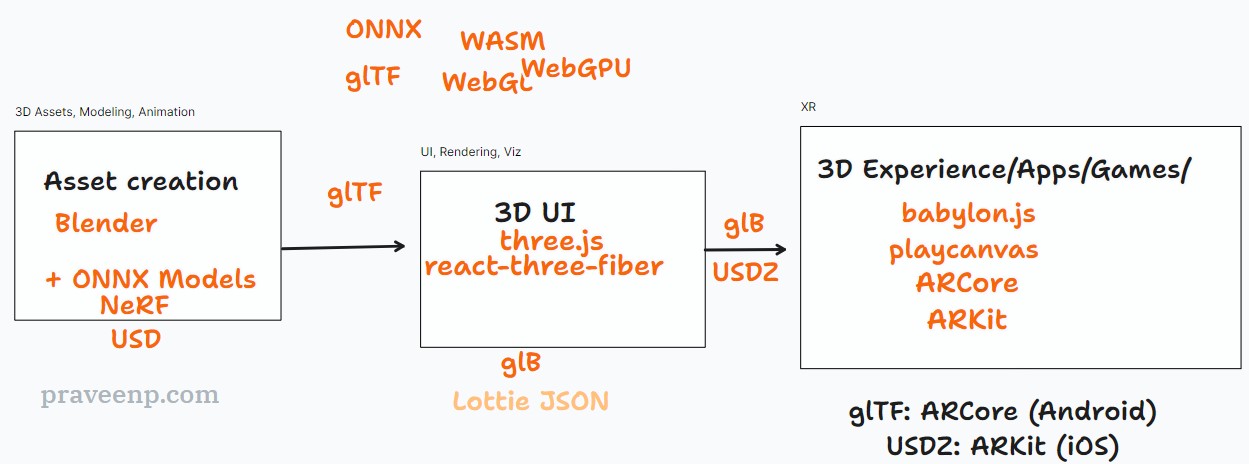
Tech stack for 3D asset, content data generation, rendering, simulation and User Experiences for extended reality
Silicon Valley Bank mismanaged risks, announced sale of securities at a loss to meet withdrawal obligations, majority-depositors were VCs in the tech and healthcare industry who were shrewd to act ...
Generative AI for text, image, audio, video generation and how it will help humanity to become more productive and accelerate memetic evolution
Summary infographics of the transformations and changes from Web 2.0 to Web 3.0
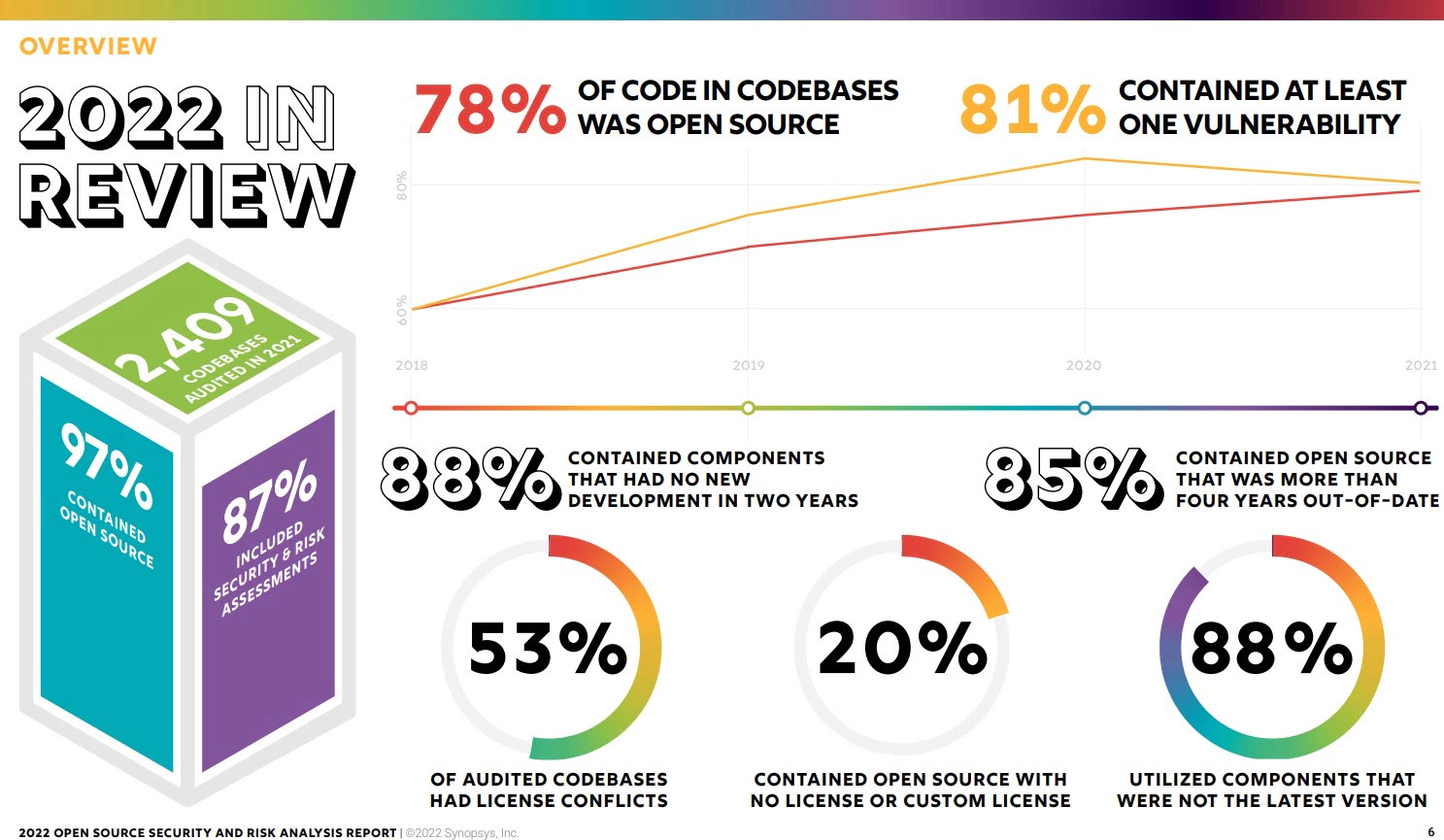
Existing value generation and capture mechanisms with Open Source Software
Enable ZFS and dm-crypt support on Windows using custom compiled WSL2 kernel
Optimizing for Life-Time-Resources using a Mental-Digital-Physical (MDP) Framework
Outer space, multi-planet energy generation for cold data storage, compute cluster and beyond
TFRL Cookbook: Tutorial guide for building, training and deploying Deep Reinforcement Learning Agents for real-world tasks implemented in TensorFlow 2.x
This book will guide you through the process of implementing your own intelligent agents to solve both discrete- and continuous-valued sequential decision-making problems with all the essential bui...
Avoiding pit falls in PyTorch Tensors
Learn to use Pytorch Distribution's hidden gem - validate_args
Model-free prediction algorithms for deep reinforcement learning --Similarities and differences (WIP)
Model-free control algorithms for deep reinforcement learning --Similarities and differences (WIP)
Running OpenGL Applications remotely through ssh from a linux system
Visual Odometry Estimation